近日,我校數(shù)理信息學(xué)院盧軍強(qiáng)教授聯(lián)合西湖大學(xué)姜漢卿教授和王蕾教授,基于折紙工藝?yán)每山到饫w維素薄膜開(kāi)發(fā)了一種可持續(xù)性閉環(huán)控制機(jī)器人系統(tǒng),相關(guān)研究工作以“Biodegradable Origami Enables Closed-Loop Sustainable Robotic Systems” 為題發(fā)表于Science Advances。西湖大學(xué)為該文第一署名單位,盧軍強(qiáng)教授為共同通訊作者。
論文鏈接:https://www.science.org/doi/10.1126/sciadv.ads0217
以ChatGPT、DeepSeek等為代表的大語(yǔ)言模型,標(biāo)志著通用人工智能研究邁出了關(guān)鍵一步。下一步,更為重要的是賦予這些大語(yǔ)言模型與人類相似的感知世界的能力,使其能夠跟人類一樣直接從現(xiàn)實(shí)世界中學(xué)習(xí)。在這一進(jìn)程中,軟體人形機(jī)器人將扮演不可或缺的角色,成為實(shí)現(xiàn)這一目標(biāo)的核心技術(shù)。目前,基于化學(xué)合成的橡膠態(tài)軟材料由于其較好的成型性、彈性、穩(wěn)定性以及多功能性,成為軟體機(jī)器人構(gòu)筑用材料的主要選擇。然而,這些橡膠態(tài)軟材料的制備過(guò)程通常涉及對(duì)環(huán)境有害的有機(jī)溶劑或者產(chǎn)生無(wú)法降解的產(chǎn)物,對(duì)于機(jī)器人領(lǐng)域的可持續(xù)發(fā)展產(chǎn)生嚴(yán)重的負(fù)面影響。為了解決機(jī)器人制備過(guò)程中對(duì)于環(huán)境的負(fù)面影響,研究者們開(kāi)始開(kāi)發(fā)可回收或可降解凝膠用于構(gòu)筑軟體機(jī)器人,但是所構(gòu)筑的軟體機(jī)器人通常只具有單一的驅(qū)動(dòng)或傳感功能,并且由于凝膠材料力學(xué)性能的限制,所構(gòu)筑的機(jī)器人的性能通常較差。因此,亟需開(kāi)發(fā)一種基于力學(xué)穩(wěn)定可持續(xù)性材料的新型機(jī)器人結(jié)構(gòu),實(shí)現(xiàn)具有全機(jī)器人功能的可靠、可持續(xù)以及可降解的軟體機(jī)器人系統(tǒng)。
為了解決上述難題,該研究將可生物降解纖維素薄膜與可變形折紙技術(shù)結(jié)合,輔以同樣可生物降解的明膠離子凝膠,提出了一種構(gòu)筑可持續(xù)和可生物降解的模塊化自感知折紙機(jī)器人的新方法。這種方法可以為高塑性材料和軟體機(jī)器人應(yīng)用場(chǎng)景之間架起一座橋梁,有望進(jìn)一步推動(dòng)高強(qiáng)度塑性材料在軟體機(jī)器人領(lǐng)域的應(yīng)用。如圖1所示,可持續(xù)折紙機(jī)器人模塊由甘油增塑的纖維素薄膜、3D打印固定板以及明膠基離子凝膠傳感器組成。纖維素折紙與明膠基凝膠分別利用水系溶劑體系進(jìn)行制備,兩者的合成過(guò)程均不使用任何環(huán)境不友好的有機(jī)溶劑,構(gòu)筑機(jī)器人系統(tǒng)過(guò)程的可持續(xù)性顯著提升。利用該方法構(gòu)筑的可持續(xù)性軟體機(jī)器人系統(tǒng)同時(shí)實(shí)現(xiàn)生態(tài)循環(huán)(生長(zhǎng)-加工-降解)和機(jī)器人功能(驅(qū)動(dòng)-傳感-交互)閉環(huán)。
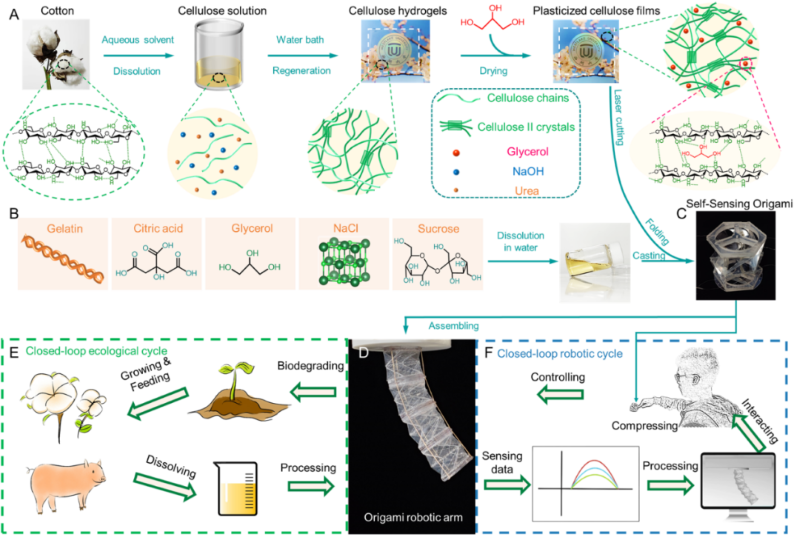
圖1.可持續(xù)性折紙機(jī)器人系統(tǒng)的構(gòu)筑方法
 教職工
教職工

 學(xué)生
學(xué)生
 考生
考生
 VPN
VPN
 辦事大廳
辦事大廳 電子郵箱
電子郵箱 新聞網(wǎng)
新聞網(wǎng) English
English 返回舊版
返回舊版






 浙公網(wǎng)安備 33030402000759號(hào)
浙公網(wǎng)安備 33030402000759號(hào)