近日,土木工程學(xué)院馮曉東副教授團(tuán)隊與日本科研人員合作在機(jī)器人領(lǐng)域頂級期刊《Soft Robotics》在線刊登題為“Trajectory Planning on Rolling Locomotion of Spherical Movable Tensegrity Robots with Multi-Gait Patterns”的最新研究成果。經(jīng)過大量數(shù)據(jù)分析及模擬測試,該研究首次實(shí)現(xiàn)了多步態(tài)球形可動張拉整體機(jī)器人在滾動運(yùn)動時的軌跡規(guī)劃,為此類軟體機(jī)器人在復(fù)雜環(huán)境和場景中的應(yīng)用提供夯實(shí)的理論依據(jù)。

圖1研究成果發(fā)表于國際頂級學(xué)術(shù)期刊《Soft Robotics》
相對于傳統(tǒng)剛性機(jī)器人結(jié)構(gòu)復(fù)雜、運(yùn)動靈活性低、環(huán)境交互性差等缺點(diǎn),柔性張拉整體機(jī)器人作為軟體機(jī)器人的一種典型代表,具有良好的柔順性、運(yùn)動靈活性、環(huán)境適應(yīng)性和交互能力,在航空航天、探勘、醫(yī)療等領(lǐng)域越來越受到重視。球形可動張拉整體機(jī)器人,憑借其重量輕、彈性強(qiáng)的內(nèi)在特點(diǎn),在探索不可預(yù)測地形和極端環(huán)境方面表現(xiàn)出巨大潛力。球形張拉整體的幾何形狀決定了其適合滾動運(yùn)動,同時其柔性特征保證了系統(tǒng)能夠?qū)Σ粩嘧兓男枨笞龀龇磻?yīng)以穿越未知地形,并在遭受嚴(yán)重?fù)p壞后仍能執(zhí)行任務(wù)。
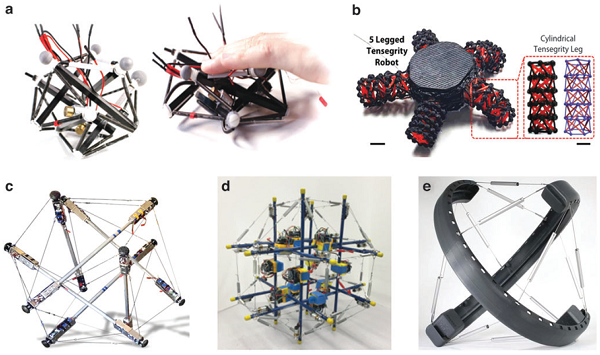
圖2柔性張拉整體機(jī)器人的應(yīng)用
現(xiàn)有的球形張拉整體機(jī)器人幾乎均為單步態(tài)運(yùn)動模式,從而導(dǎo)致其在對未知復(fù)雜環(huán)境進(jìn)行探索時存在步態(tài)單一、路徑空間盲區(qū)大、行進(jìn)效率低等缺陷。為此,研究團(tuán)隊開發(fā)了三個具有多步態(tài)特征的12桿張拉整體機(jī)器人原型并對其各自的獨(dú)立(或進(jìn)化)步態(tài)模式進(jìn)行了動態(tài)模擬和驗(yàn)證,并結(jié)合步態(tài)驅(qū)動量、路徑盲區(qū)大小和行進(jìn)跨度等參數(shù)指標(biāo)評估三種12桿張拉整體機(jī)器人與經(jīng)典的6桿張拉整體機(jī)器人在運(yùn)動學(xué)步態(tài)模式的可行性和適用性,從而篩選出最優(yōu)者。
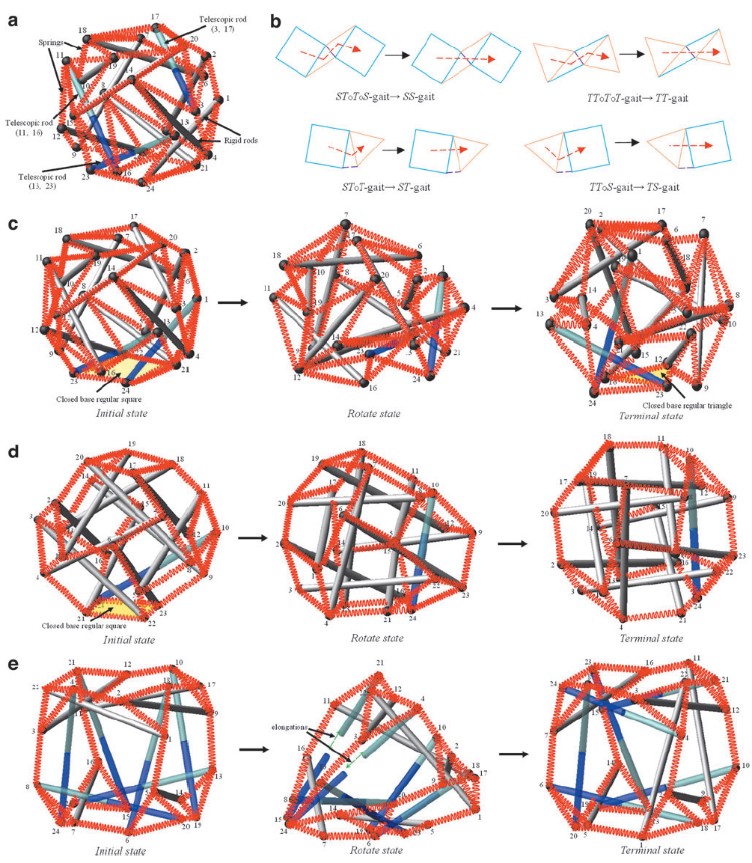
圖3 三種12桿球形張拉整體機(jī)器人的基本獨(dú)立步態(tài)及進(jìn)化步態(tài)分類及模擬
進(jìn)一步地,研究團(tuán)隊制定了一套軌跡轉(zhuǎn)向控制策略并將其嵌入至改進(jìn)的快速搜索隨機(jī)樹(MRRT)算法用以生成最佳軌跡路線,提出了兩個適用于多步態(tài)張拉整體機(jī)器人的重要引導(dǎo)指標(biāo),以搜索與特定需求相符的最佳步態(tài)模式,從而實(shí)現(xiàn)了基于目標(biāo)優(yōu)先級的機(jī)器人軌跡路線自適應(yīng)調(diào)整。
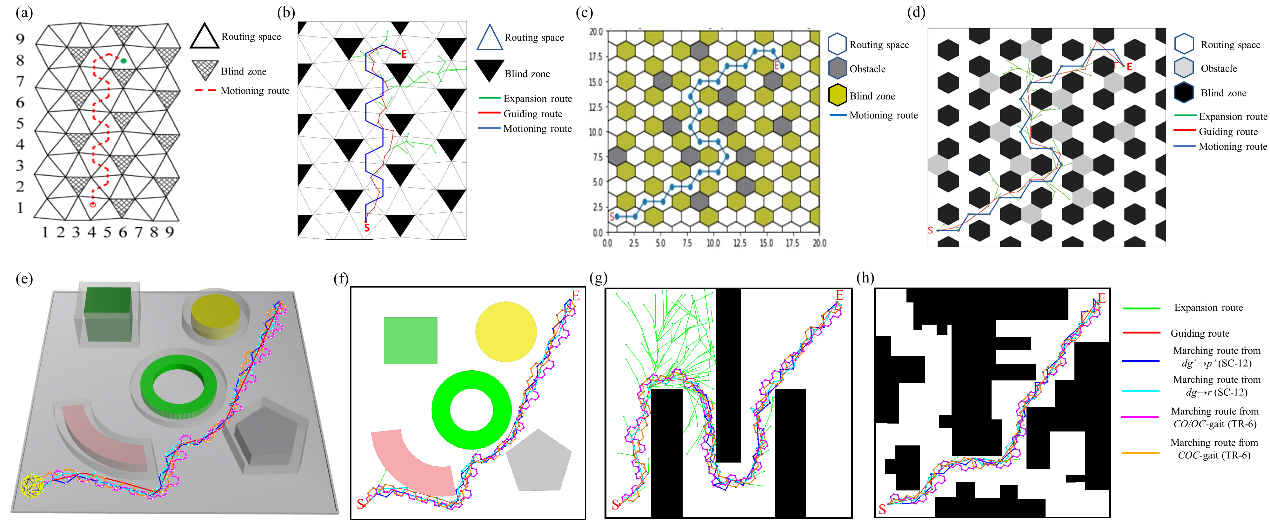
圖4 三種12桿球形張拉整體機(jī)器人在探索三個場景時形成的最佳軌跡
我校土木工程學(xué)院、人工智能研究院馮曉東副教授為論文第一作者,日本京都大學(xué)張景耀教授為通訊作者。土木工程學(xué)院研究生徐佶、日本京都大學(xué)Ohsaki Makoto教授、紹興文理學(xué)院趙陽教授、浙江大學(xué)羅堯治教授、東南大學(xué)陳耀教授、浙江大學(xué)許賢教授等科研人員共同參與了此項工作。該研究得到了國家自然科學(xué)基金(Grant No. 51908356),國家留學(xué)基金委(Grant No. 202008330250)等相關(guān)項目資助。
據(jù)悉,《Soft Robotics》是機(jī)器人領(lǐng)域的頂級期刊,具有廣泛的國際影響力。該期刊鼓勵多學(xué)科交叉,涵蓋機(jī)械、力學(xué)、材料、控制、化學(xué)、生命科學(xué)等多個領(lǐng)域。
論文鏈接:https://www.liebertpub.com/doi/full/10.1089/soro.2023.0103?#core-collateral-purchase-access
 教職工
教職工

 學(xué)生
學(xué)生
 考生
考生
 VPN
VPN
 辦事大廳
辦事大廳 電子郵箱
電子郵箱 新聞網(wǎng)
新聞網(wǎng) English
English 返回舊版
返回舊版




 浙公網(wǎng)安備 33030402000759號
浙公網(wǎng)安備 33030402000759號

